How The Highest Jumping Robot Reaches Such Great Heights

The average human is unable to jump more than two or three feet (via The Exercisers). In the animal kingdom, we are vastly outnumbered by creatures with superb jumping abilities — and the robotics kingdom has us beyond beat, too. This unassuming little robot now holds the record for the highest vertical jump. The previous robotic record holder for vertical distance conquered barely surpassed the height of one story. This highest-jumping robot can take 10 stories in a single bound, which is made all the more impressive by the robot weighing less than a tennis ball. That's almost 102 feet (31 meters) high, reports Veritasium via YouTube, equidistant to the length between the Statue of Liberty's feet and eyes.
This kind of technology could prove to be very helpful in planetary body exploration, the report explains. With the moon's gravitational strength being just a sixth of Earth's, this little jumping machine would leap over 410 feet vertically and over 1,600 feet horizontally — easily going where humans would be unable due to thin atmospheres or unstable terrain to collect samples or data. The wheels to achieve this possibility are already in motion; according to the Veritasium video, the robot's developers are working on models that can be steered and autonomously right themselves for another launch.
The potential of robotic jumpers in space
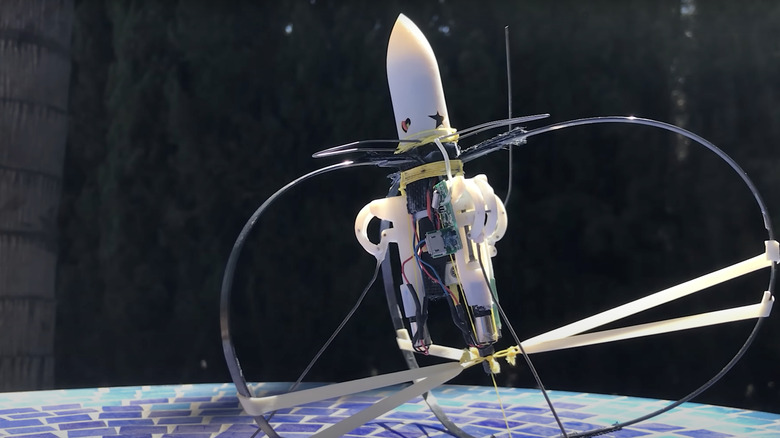
How can such a small machine pull off such great heights? As the Veritasium video states, there are some technical requirements for something to be classified as a jump — for there can't be fuel burned like in a rocket or a launch mechanism that doesn't stay with the projectile, like with a bow and arrow. So, the world's highest jumping robot must only rely on its own design and structure to leap into the air. The robot is propelled forward by four carbon fiber arches that are bound to a middle support axle by elastic bands.
The bottlenose-like compartment on the top of the robot holds a motor, connected to the axle by a string. When the motor is turned on, it winds up the string, thus shorting the middle support and forcing the carbon fiber arches to bow. The mounting tension in the arches and elastic bands acts as a spring, and when a trigger by the motor suddenly releases the wound-up string, the arches and elastic bands snap back into shape, forcefully thrusting the robot upward. Its height can be credited to its lightweight structure, the gradual build-up of energy through the winding string, and the elastic energy of its material. The resulting spring is incredibly efficient — efficient enough to conquer multiple stories in single bounds.