Kinect Quadrocopter Is Your Autonomous AR.Drone [Video]
Parrot's AR.Drone – which we reviewed over the weekend – is clever, but it still requires a meat pilot; strap on a Kinect sensor bar, meanwhile, and a quadrocopter is capable of going it alone. The autonomous 'copter is the handiwork of the Hybrid Systems lab at the University of California at Berkeley, with the Kinect feeding positioning data to an onboard 1.6GHz Atom Ubuntu computer.Video demo after the cut
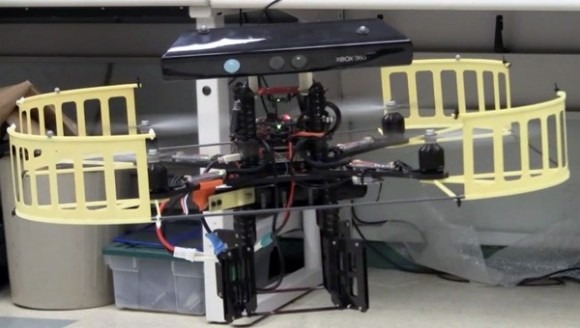
Their Pelican quadricopter is carried over from an existing project, and with the Kinect is capable of mapping the terrain around itself and then avoiding obstacles along the way. The sensor bar hookup uses the OpenKinect/Freenect drivers and a planar model is created from the camera views from which altitude can be calculated.
The Kinect isn't entirely responsible for autonomous flight, since there's a VICON motion-capture system which controls lateral and yaw movement, as well as acting as a backup for the Kinect's altitude data should that fail. Still, the combination certainly works well; the project team says the demo in the video below had no issues relying on the Microsoft sensor.
[via Engadget]