Scientists Build The Fastest Soft Robots Ever Based On The Cheetah
Scientists have created what they call the fastest soft robots ever, inspired by the biomechanics of cheetahs. The soft robot is capable of moving more quickly on solid surfaces or in the water than previous generations. The new soft robots are also capable of grabbing objects delicately or with sufficient strength to lift heavy objects.
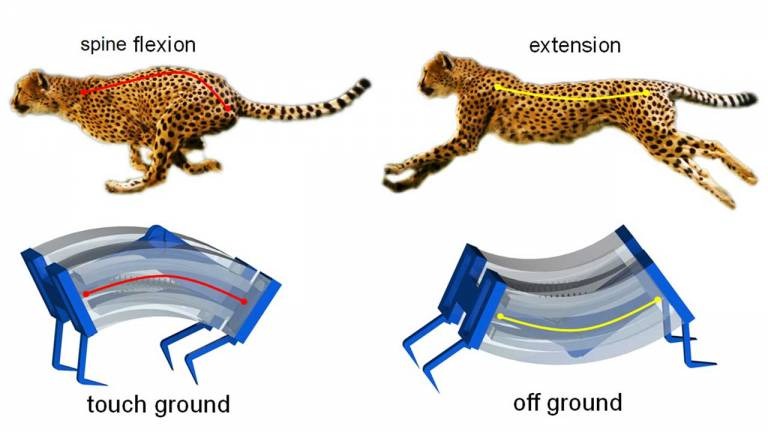
The scientists say that the key to the blazing speed of the cheetah is power derived from the flexing of their spines. The team created a new type of soft robot that has a spring-powered bistable spine that gives the robot two stable states. Switching between those stable states requires rapidly pumping air into channels that line the soft, silicone robot. Switching between the two-stages releases a significant amount of energy, allowing the robot to exert force against the ground quickly.
The flexing action allows the robot to gallop across the surface with its feet leaving the ground. Previously, the soft robots developed by the team remaining in constant contact with the ground, limiting their speed. The team says that until now, the fastest soft robots were able to move at speeds of up to 0.8 body lengths per second on flat solid surfaces.
The newly developed soft robots based on the cheetah can reach speeds of up to 2.7 body lengths per second. The team says that speed is more than three times faster than previous generations and has achieved a low actuation frequency of about 3 Hz. The new robot can also run up steep inclines, which is something that would be challenging if not impossible for soft robots that exert less force against the ground.
The robots the team developed are about 7 cm long and weigh about 45 g. When the team attached a fin, rather than feet, the robot was able to swim at 0.78 body lengths per second compared to a speed of 0.7 body lengths per second for previous generations. Using a pair of the soft robots, the team is also investigating the design for grabbing objects.