Robots Are Learning To Move Using Multi-Contact Locomotion
We've all been moving through cluttered areas, or perhaps after a night of too much partying, at some point in our lives and put out our arms to help brace ourselves on nearby objects. Robotics researchers are now teaching bipedal robots to move using their arms and their legs. The team says that humans have used multi-contact locomotion throughout history to navigate tricky environments, and robots are now learning to use the same skill.
For humans, the legs are the primary mobility system, but there are situations where humans use their arms as well. People use their arms passively to keep balance or actively by putting a hand out to steady ourselves on nearby objects. Robots are inherently unstable in some situations. Even though bipedal robots typically have arms, researchers have had a challenge in software and hardware, limiting a robot's ability to leverage their arms as people do.
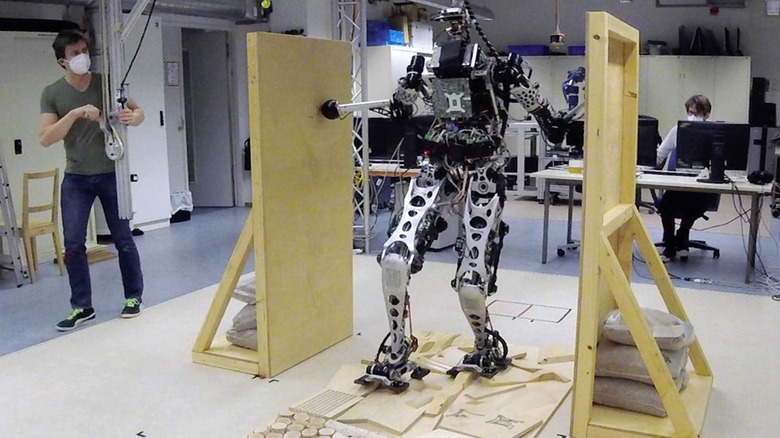
Robot assists from TUM in Germany have equipped a humanoid robot called LOLA with significant upgrades to make multi-contact locomotion possible. The team says the tech is still in the early stages, but it has given LOLA some of the most human-like bipedal locomotion seen in robots so far. Multi-contact locomotion is often used by humans in instances where it's planned in advance and when it's not and would be a valuable skill for robots to learn.
For now, the ability for LOLA to use its arms isn't fully automated. Researchers are setting foot position and arm contact points by hand in advance. In the future, scientists hope these techniques will be done autonomously. They note that some of the most challenging parts, such as using multiple contact points dynamically for balance of the moving robot, are being performed onboard the robot in real-time.