Researchers Use Origami To Build Crawling, Jumping Robots
One robot can can crawl on four "legs" without the need for any sort of motor. Another can jump to seven times its height. Both can fit on the palm of one hand. Yes, these are not your average robot and are not even close to any humanoid robot you may have seen. They look more like metallic origami figures, and that isn't that far from the truth. In fact, the researchers at the École Polytechnique Fédérale de Lausanne or EPFL in Switzerland call these robots as "robogami".
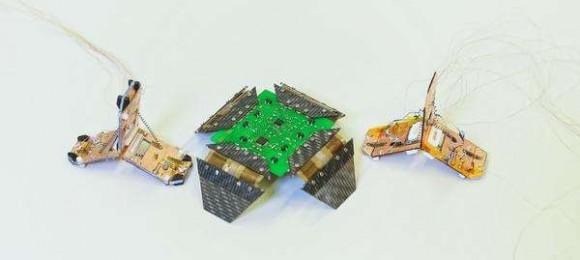
Although these robots take inspiration from origami in terms of their form and self-sufficiency, not needing additional parts to move or stay in shape, they also take inspiration from other sources, like nature. The crawling and jumping Tribot, for example, looks up (or down) to the inch worm for how it moves, though you probably wouldn't be able to tell from the way it looks, basically a "T" shaped three-legged contraption. What makes the Tribot unique, however, is how it can switch between crawling and jumping movements without having to be reset.
A larger robot looks like a flat square with four legs, one on each side, a half spider almost. This one can move its legs without the help of motors. This is made possible through the use of shape memory alloys, materials that can remember their initial shape even after it has been deformed by applying heat. This contraction and retraction movement, in turn, can cause the robot itself to move.
At the moment, there are no known applications for these robots yet but they open the doors to possible new types of robots and new modes of production. The Tribot, for example, could be mass produced in flat sheets and then assembled as easily as IKEA furniture. They can also be useful in navigating terrain, though that will require the addition of sensors and micro cameras.
SOURCE: Phys.org