Researchers Create Origami-Inspired Manipulator For Teleoperated Surgical Procedures
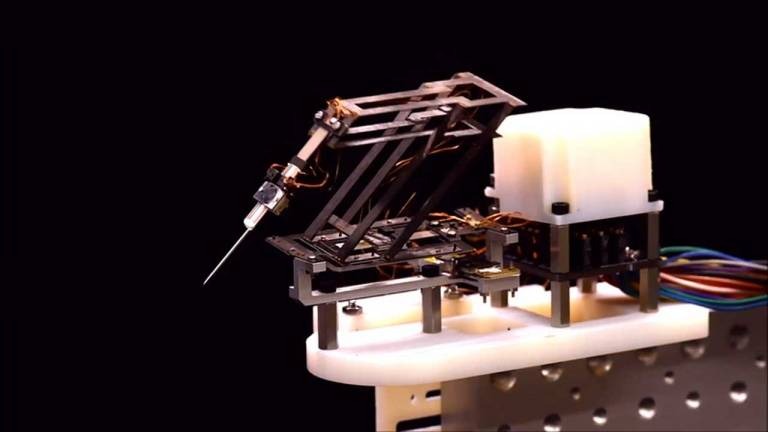
Researchers have created a new surgical tool to help improve the precision and control for teleoperated surgical procedures. The new device was designed in collaboration between the Wyss Associate Faculty member Robert Wood, Ph.D., and Robotics Engineer Hiroyuki Suzuki of Sony Corporation. The device they created is a surgical robot that uses origami-inspired design.The device is a miniature remote center of motion manipulator known as the mini-RCM. It's about the size of a tennis ball and weighs about as much as a penny. It has been able to perform a problematic microsurgical task in simulation. The device is designed using materials deposited on top of each other in layers and bonded together. The team then laser-cut a specific pattern that allows three-dimensional shape to pop up, similar to a children's book.
The technique simplifies the mass production of small and intricate structures. Without using their construction method, such complex systems would have to be hand-constructed. Researchers created a parallelogram shape to serve as the robot's main structure and then fabricated three linear actuators to control the robot's movement. One actuator parallel to the structure's bottom raises and lowers, while one perpendicular to the parallelogram rotates it.
Another is in the tip of the parallelogram that extends retracts the tool that's in use. The result is a robot that is much smaller and lighter than other microsurgical devices previously developed. The actuators used are built around the piezoelectric ceramic material able to change shape when an electrical field is applied. The shape change pushes the actuator runner unit along with the rail unit like a train on tracks. The linear motion moves the robot.
The team also integrated LED-based optical sensors into the robot to detect and correct any deviations from the desired movement, such as those caused by hand tremors. The researchers say the creation is much steadier than the hands of a surgeon.