Researchers Break Robot's Leg, Teach It To Walk Again
Our future robotic neighbors will be as vulnerable to injury as their human counterparts, and as such will have to learn to adapt to compensate for whatever goes wrong until someone gets it fixed. To do this, some researchers in Paris deliberately broke a robot's leg to teach it an important lesson.
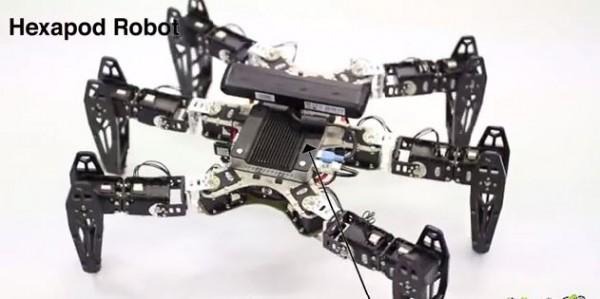
The task of teaching a robot how to adapt to an injury has been undertaken by researchers at Sorbonne University in Paris, where a hexapod robot was the subject of a test. Before suffering a broken leg, the robot was equipped with a database providing 13,000 ways to walk.
After being supplied this information, one of the middle legs was disabled, which — as demonstrated in the video above — resulted in a crippled robot. The machine scooted to the side, eventually progressing to a slow hobble.
After trying out several possible ways to walk, the robot eventually found one (it took 40 seconds) that works well enough for it to get back on track. The task was completed by the robot itself, with no help from its human creators.
VIA: Gizmodo