New Snake-Like Robot Has Better Slithering Thanks To Faux Scales
One of the things that allow a snake to move so efficiently across the ground, even if the ground has little traction are its scales. The scales open up and allow the snake to grip the ground for more efficient motion. A new and improved robot that was inspired by a snake has been developed at Harvard and the bot uses kirigami in its skin.
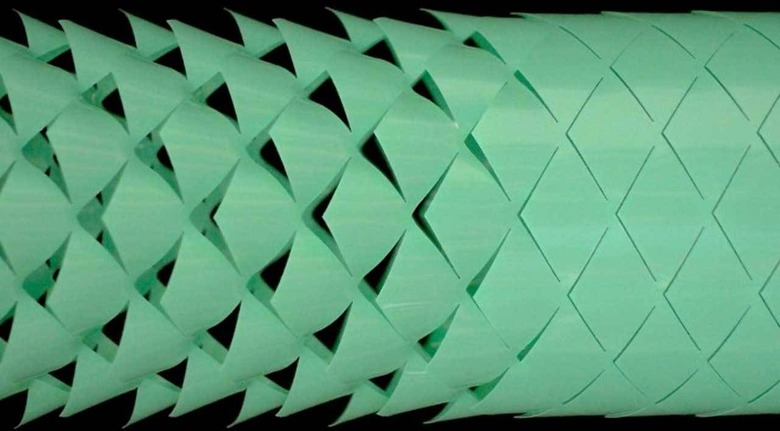
Kirigami is a Japanese paper craft that relies on cuts to change the properties of the material. With the snake-inspired robot, as it stretches the surface of the skin pops up into a 3D textured surface that grips the ground like snakeskin with scales. The first iteration of the robot used a flat kirigami sheet that transformed uniformly when it stretched. The new bot has a programmable shell with kirigami cuts that can pop up as desired.
The researchers say that the new robot is the first example of a kirigami structure with non-uniform pop-up deformations. Researcher Ahmad Rafsanjani, the first author of the paper on the robot, says that this sort of control over the shape-transformation could be used to design surfaces and skins that can change on demand.
In the new research, the team combined two different properties of the sheets including the size of the cuts and curvature of the sheet. Through controlling those features, the team could program pop-ups from one end to another and control them locally.
The team leveraged previous research that wrapped a flat kirigami sheet around an elastomer actuator. That rolled the kirigami surface into a cylinder with an actuator applying force at two ends. The team plans to develop an inverse design model to allow for more complex deformations in the future.