NASA Details How The Perseverance Mars Rover Took A Selfie On The Red Planet
NASA has several Mars missions going on right now, and the most recent is the Perseverance Mars rover. The mission of Perseverance has gone very well and has included successful test flights of the Ingenuity Mars helicopter, one of the cooler things that Perseverance is done so far is take a selfie on the Red Planet. When people take selfies here on Earth, it's a quick snap and done, but it's not so easy on Mars.
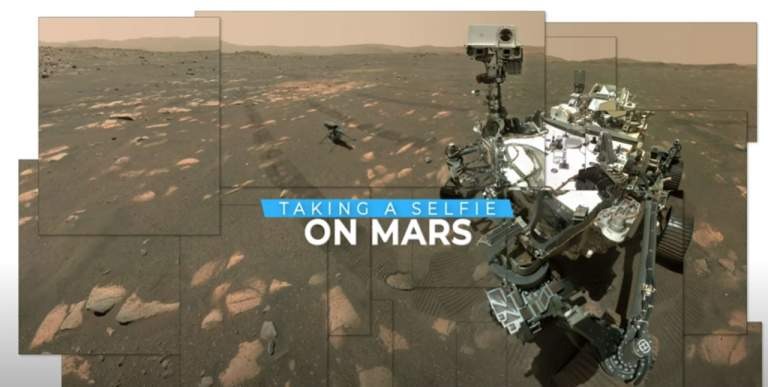
NASA has shared a video that shows Perseverance capturing its selfie taken on August 6, 2021. The selfie showed the rover beside the Ingenuity Mars Helicopter. Adding another layer of interest is that the video offers the sound of the motors moving the robotic arm that has the rover's entry, descent, and landing microphone attached along with the camera. Selfies are more than interesting pictures for the NASA team to share with space fans around the world.
The real function of the selfie is to allow engineers to check wear-and-tear on the rover. The video was shot from one of the navigation cameras and shows the robotic arm twisting and moving around to take the 62 images that were stitched together to make the selfie. NASA says a team of about a dozen people worked to make the selfie happen, including rover drivers, engineers, and camera operations engineers. Those people develop the camera sequence, process the images, and stitch them together to build the selfie.
The team says it took about a week to plot all the individual commands required. NASA notes that everyone on the team worked on "Mars time," which is important because a day on Mars is 37 minutes longer than a day on earth. The team had to be awake in the middle of the night to work and sleep during the day at some point. The team at JPL worked with another company called Malin Space Systems in San Diego, which built and operates the camera responsible for the selfie.
The camera is known as WATSON standing for Wide Angle Topographic Sensor for Operations and eNgineering. Each of the images taken by the camera had only a small portion of the scene, requiring them all to be stitched together. The team also had to clean up blemishes caused by dust settled on the camera's light detector and assemble individual frames into a mosaic before smoothing out the seams using the software. The final result was then warped and cropped, so it looked more like a normal camera photo.