MIT Researchers Create A Robot With A Soft Gripper That Can Manipulate Cables
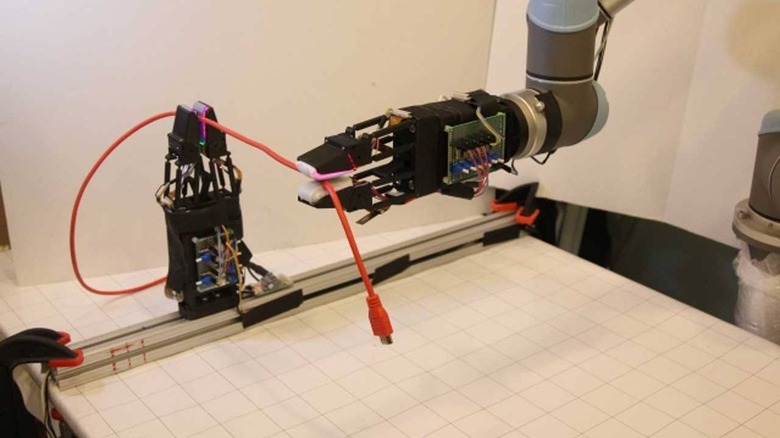
One of the most challenging things for humans to manipulate are items like rope, wire, or cables. These thin, flexible objects are even more difficult for robots to manage with most robotic grippers being unable to handle them at all. Researchers at MIT have now created a robotic gripper that's able to mimic how a human handles such flexible objects more closely.The system uses a pair of soft robotic grippers with a high-resolution tactile sensor to manipulate freely moving cables. The team built a two-fingered gripper with opposing figures that are lightweight and quick moving to allow for real-time adjustment of force and position. On the tip of each of the grippers is a vision-based (GelSight) sensor that's built from soft rubber with embedded cameras.
The gripper is mounted to a robotic arm that's able to move as part of the control system. The GelSight sensors are used to estimate the position of the cable between the fingers and measure the frictional forces of the cable slides. The system has dual controllers that run in parallel with one modulating grip strength and the other adjusting the gripper position to keep the cable held firmly.
The gripper was able to reliably follow a USB cable starting from a random grip position and, in combination with the second gripper, could move the cable "hand over hand" as a person would to find the end of the cable. The gripper was also able to adapt to cables of different materials and thicknesses.
The robot was able to perform an action that humans routinely do when they plug earbuds into a cell phone. The robot started with the free-floating earbud cable and was able to slide the cable twins fingers stop when it felt the plug touch its fingers, and adjust the plug supposed to be able to insert the plug into the jack. The video above shows that in action.