MIT ChainFORM Robot Is Made Up Of A Bunch Of Small Modules
As robotics matures many of the components that go into making a functional bot are shrinking in size and that allows the robots themselves to get smaller as well. The catch is that depending on what the robot needs to do, you may not want the bot to be particularly small. MIT is working on a mobile robotic platform that takes lots of little modules and those modules can be configured on the fly to create a robot of the size you need and the capability you need when you need it. The bot using this modular approach is called the ChainFORM
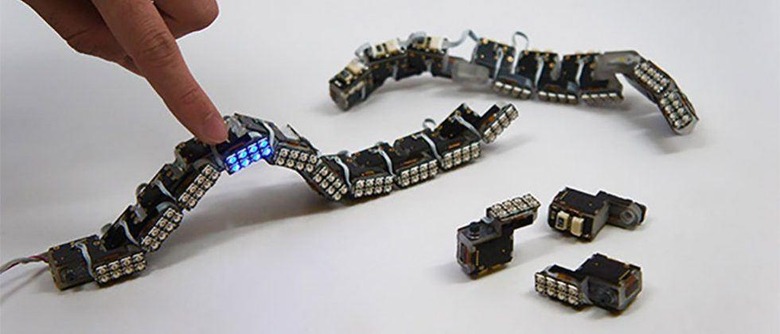
ChainFORM is a modular robot that allows you to use as many modules as is needed to perform the task that needs doing. MIT Media Lab calls ChainFORM a shape changing interface. Each of the modules that make up the bot have touch detection on multiple services, angular detection, lights, and motor actuation via a single servo motor.

The models also have a communication architecture that allows them to determine how many models are in the bot and how the modules are connected to each other. All the while the communication system allows or real-time input and output. That means that each module knows its position to other modules at all times and that allows the modules to be adaptively change its function as needed.
Each model at this point in the design isn't self-contained, so ChainFORM isn't totally modular. The bot requires a tether for power and control of the bot is handled by a master board that interfaces with the computer over USB. Each module in ChainFORM is able to exert 0.8 kg/cm of torque allowing it to be able to move light objects. That means the bot can't lift much, but can provide enough force for haptic feedback.
SOURCE: Spectrum