MIT Algorithm Trains Drones To Fly Faster Without Crashing
Drone racing is a relatively new sport, with drones racing around a track with obstacles the drones are required to avoid as quickly as possible. While drone racing is purely for fun, the technology behind avoiding obstacles in these races can also allow drones to avoid obstacles when they're being used for critical and time-sensitive operations such as search and rescue. MIT is trying to make drones capable of flying faster while avoiding obstacles in their way.
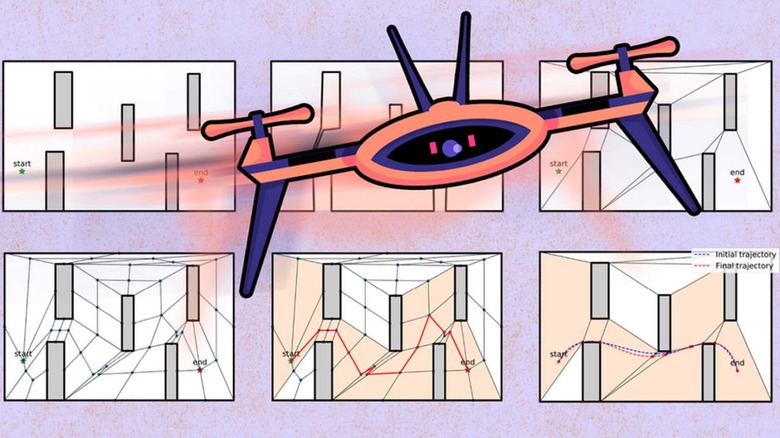
MIT aerospace engineers have developed an algorithm that allows drones to choose the fastest route around obstacles without crashing into them. The algorithm combines simulations of the drone flying through a virtual obstacle course and experiments involving an actual drone flying through the same course in the real world. When drones are trained using the new algorithm, they could fly through an obstacle course up to 20 percent faster than drones trained using a conventional algorithm for planning flight paths.
While the MIT team found their algorithm could result in significantly faster flights through the course, they also found that drones trained with their new algorithm weren't always faster than drones trained on conventional algorithms. In professional motorsports, pilots and drivers know sometimes you have to slow down in some areas to go faster in others.
MIT's algorithm can determine if it's better to slow down, even if the competition overtakes it, to be faster later. Project researchers believe algorithms of the sort they've developed are an important step towards enabling future drones to navigate highly complex environments very quickly. For example, the technology could one day enable drones used for search and rescue operations to quickly and precisely navigate crowded and dangerous environments.