Mini Rover Lifts And Wiggles Its Wheels To Walk Over Sandy Lunar Hills
Many people might not understand the fuss over a new rover that lands and rolls over the moon, Mars, or even an asteroid. After all, isn't it just a crude looking car that happens to have gone outer space? It's easy to take for granted that these aren't remote-controlled vehicles but are pretty much the self-driving cars that we can only dream of here on Earth. These rovers have to navigate literally alien terrain mostly on their own and, as this Mini Rover prototype demonstrates, needs to avoid sand traps without much human assistance.
It's hard enough to navigate and drive over the unfamiliar and rocky surface of the Moon and Mars, it's even harder to navigate and drive over hills that have loose material and granular surfaces. As anyone driving over desert sands will be able to tell, you'll need special wheels and a lot of power to do so, things that rovers don't have available lightyears away.
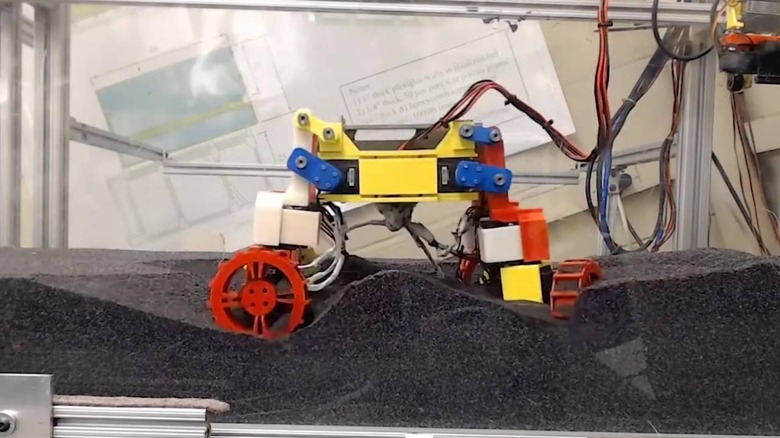
That's why researchers from Georgia Tech and NASA's Johnson Space Center have worked on a solution that doesn't need to use expensive or special parts but common parts that simply use robotics and mechanics to get a rover out of a tough spot. Their solution has been dubbed "rear rotator pedaling" and it pretty much looks like the rover wiggling its wheels.
It's not as simple as lifting and wiggling your feet to get the sound off the bottom of your shoes but there is some part of that. What it actually does is "avalanche" the sandy material from the front wheels to the back wheels, creating a sort of hill that the rear wheels can more easily climb over. Repeat this more than enough times and the vehicle will eventually reach its destination.
Of course, this Mini Rover is named as such because it is but a fraction of full-sized robot on wheels. The next step would then be to scale up the robot to see if the same terradynamics would work with a larger rover. They aren't limiting its applications to exotic extraterrestrial locations either as the same locomotion principles could eventually be applied to robots who also have to navigate uneven and unstable terrain here on Terra Firma.