Hopping Robot Legs Use Artificial Fibreglass Tendons
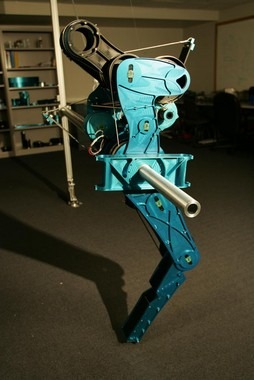
A team at Oregon State University have apparently taken another step toward giving walking robots a more human-like – and energy efficient – gait, by fitting them with artificial tendons. Existing robotic limbs struggle to recover energy through a springy gait, but the Oregon team have introduced steel cable tendons and fibreglass springs made from the same material as archers' bows that allow far smaller motors to be used.Check out the demo video of the hopping robot leg in action after the cut

In humans, 40-percent of the total energy expended during walking and running is stored in the tendons; robots can be programmed to adopt a similar, springy gait, but that requires a lot of energy and even then the results are poor. The new system employs the motors to store energy in the springs, instead; each can store a kilojoule of energy per kilogram. A motor providing the same power on its own would apparently weigh 30 times as much as the spring does.
The next step is introducing an artificial sense of balance. A bipedal robot based on the spring technology can already walk on even ground, but work is needed to improve uneven terrain performance. Here, the spring will also act as a natural shock absorber.
Frankly I can see uses for this already. Slap a touchscreen monitor on it, give it some software to follow you around, and you have a great mobile workstation. Obviously you'll have to learn to synchronize your own hopping in order to use it without getting nauseous, but such is the price of technology.
[via New Scientist]