Cat-Like AGRO Robot Always Lands On Its Wheels
One of the challenges emergency response workers face when trying to deploy a robot into a hazardous setting is getting the robot where it needs to be. Sometimes it's best to throw a robot into a debris-filled room or building, but robots have to be on their wheels or treads, or they're not functional. Researchers have developed a robot known as AGRO that can be thrown into an environment and always lands on its wheels.
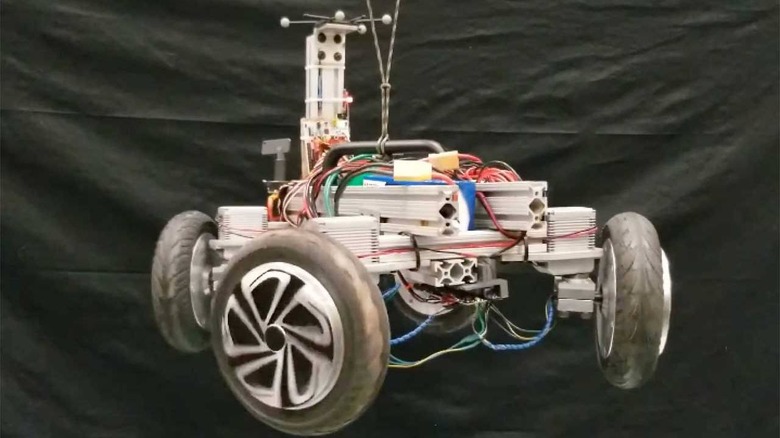
AGRO stands for Agile Ground RObot, and the prototype was created by the team from the US Military Academy at West Point. Each wheel can move independently of the others and has its own electric hub motor. Being able to steer each wheel independently allows the robot to be more agile and maneuverable.
When the robot is thrown, its onboard inertial measurement unit can detect the freefall in an instant. The inertial measurement unit then triggers an integrated proportional-derivative (PD) controller that sets each of the wheels spinning at different angles and speeds. The result of the wheels spinning at different angles and speeds delivers torque to control the pitch, roll, and yaw angles of the robot so it can land on all four wheels.
That action ensures that the robot always lands upright on its wheels and helps distribute impact forces evenly, minimizing potential damage. Once on its wheels, AGRO can head into the environment and explore in aid of human rescue workers. The design team has plans to build a future version with bending legs with wheels on the ends.
That design would help absorb shock from impacts and allow the robot to step over obstacles. AGRO was designed at the Robotics Research Center at the Academy.