Ant-Like Swarm Robots Built By A Researcher At Notre Dame
A robotics researcher from the University of Notre Dame, Yasemin Ozkan-Aydin, has created four-legged robots that look like robotic ants. The robots were inspired by biological systems such as the collective behavior of ants, honeybees, and birds that work together to solve problems and overcome obstacles. The multi-legged robots designed by the researcher can maneuver in difficult environments and accomplish tasks collectively.
Legged robots appeal to researchers because they can navigate challenging environments, including rough terrain and tight spaces. Their limbs are used for support along with enabling maneuverability and obstacle crossing capability. However, researchers had to overcome some challenges unique to legged robots that result in reduced performance.
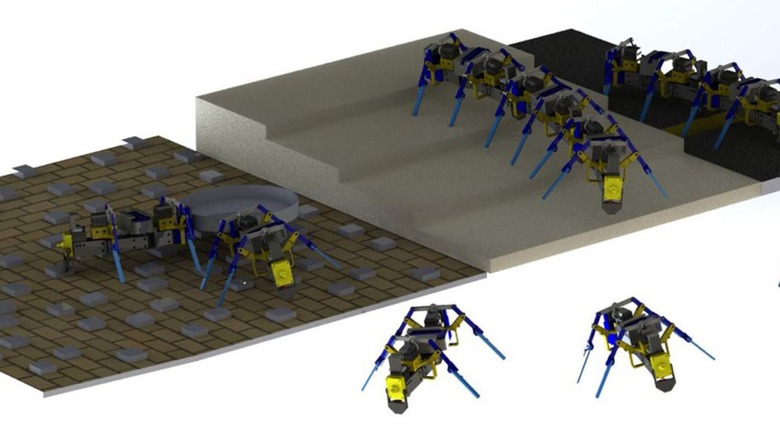
Ozkan-Aydin had a hypothesis that a physical connection between individual robots would enhance the mobility of a collective mobility system using legs. Individual robots can perform small and simple tasks like moving over smooth surfaces carrying lightweight objects. However, for tasks beyond a single robot's capability, robots can physically connect to form a larger multi-legged system to overcome obstacles.
One example used is how ants can use their own bodies to create a bridge across the gap, allowing the group to cross. Ozkan-Aydin built 3D printed robots that measure 15 to 20 centimeters in length, each fitted with a lithium polymer battery. Along with a battery for power, each of the robots also had its own microcontroller and three sensors.
Sensors include a light sensor in the front of the robot and a pair of magnetic touch sensors on the front and back. When an individual robot gets stuck, it sends a signal to other robots that link together, providing support to get around an obstacle. There are improvements to be made in the system, and research is ongoing.