Tiny Robots Work Together To Complete Complex Tasks
Researchers at EPFL have developed a group of small robots that weigh only 10 grams each that are able to work as a group. The small robots are inspired by trap-jaw ants; individually, ants only have so much strength and intelligence. As a colony of ants, they can complete sophisticated tasks and evade larger predators.
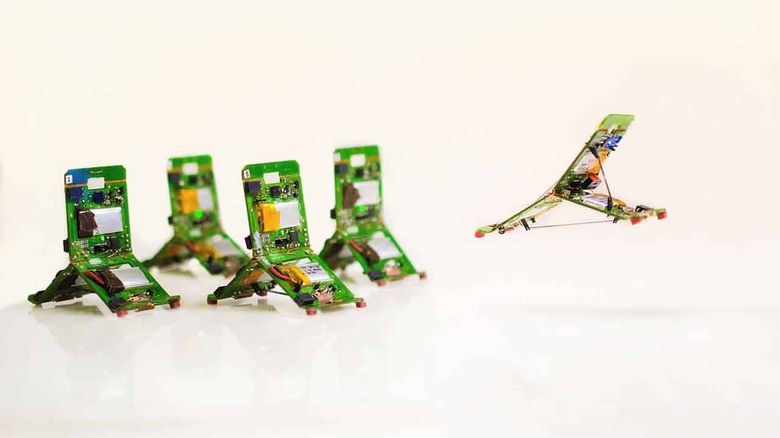
Each of the small robots has multiple methods of moving around and can navigate any type of surface. They are able as a group to detect and overcome obstacles and to move objects that are much heavier than themselves. The small robots are three-legged, T-shaped origami robots called Tribots.
The bots can be assembled in a few minutes by folding a stack of thin, multi-material sheets, making them suitable for mass production. The little robots are entirely autonomous and untethered and fitted with infrared and proximity sensors. The team says that Tribots could accommodate more sensors depending on the application. One key feature of the trap-jaw ants that the robots replicate is the ant's ability to jump leaf to leaf.
The ants jump by snapping their powerful jaws together. Tribots replicate that jumping mechanism by taking advantage of their origami design with multiple shape-memory alloy actuators. The design allows a single Tribot to produce five locomotion gaits, including vertical jumping, horizontal jumping, somersaulting, and crawling. Each bot has the same anatomy but is assigned its own specific task.
Tribot explorers detect physical objects in their path and inform the group when an obstacle is encountered. The leader Tribot then hands out instructions while the worker bots pool strength to move objects. The bots can also change assignments on their own if a robot goes missing or the mission parameters change.