This Soft Robotic Muscle Can Sweat
Cornell University researchers have created a soft robotic muscle that can regulate its temperature through sweating. Thermal management is important for robots and is a basic building block for enabling untethered, high-power robots to operate for long periods without overheating. One of the biggest challenges to robots with those features is thermal management.Scientists say that if the high-torque density motors and exothermic engines that power robots overheat, the robot stops operating. A particular challenge for cooling comes with soft robots made of synthetic materials. While robots made of metal can dissipate heat, soft robots hold heat.
The team says that cooling technology inside like a fan might not help much because it would take up space and add weight. Researchers took inspiration for cooling a soft robot from how mammals stay cool – sweating. A nanopolymer to enable sweating was created using a 3D printing technique called multi-material stereolithography that uses light to cure the resin in a predesigned shape.
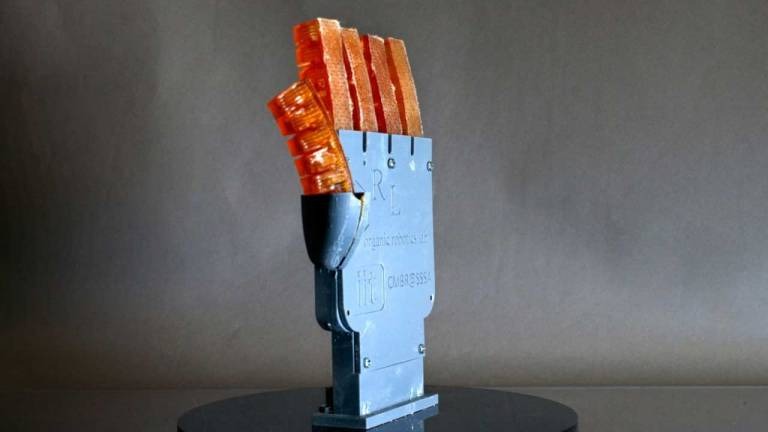
The fingerlike actuators are composed of two hydrogel materials that can retain water and respond to temperature. They react at temperatures over 86F by shrinking, which squeezes water up into a top layer of polyacrylamide that is perforated with micron-sized pores. The pores dilate and release the water and then close when the temperature drops below 86F.
Scientists on the project say that the evaporation of the water reduces the actuator's surface temperature by 21C within 30 seconds. The cooling process is as much as three times more efficient than in humans. Actuators can cool off six times faster when exposed to wind from a fan. Downsides are potentially hindered mobility and the fact that robots need to refill their water.