Researchers Design Robots With Wheels That Transform Into Legs
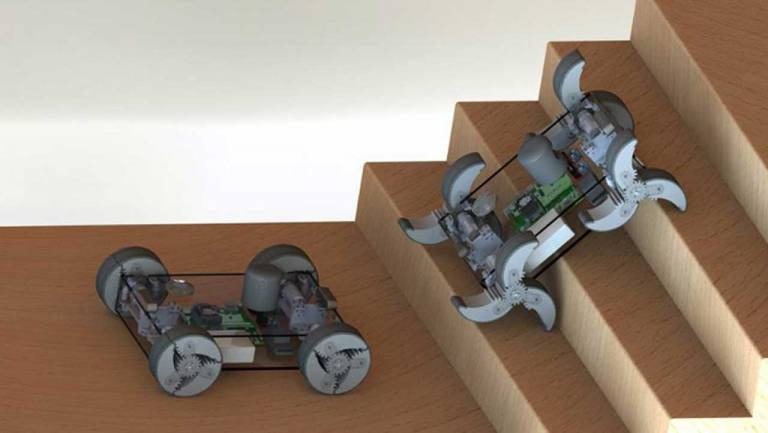
One of the most efficient ways for robots to move around the environment is wheels on relatively smooth terrain. However, wheels aren't the most efficient way of traveling when it comes to getting over certain types of obstacles. Legs, for instance, can help a robot to climb obstacles like stairs. Scientists at Texas A&M University have teamed up with DARPA to create robots for military applications able to determine with or without human intervention whether wheels or legs are more suitable to travel across the terrain.The project is part of the DARPA Offensive Swarm-Enabled Tactics (OFFSET) program in the Department of Engineering Technology and Industrial Distribution at the University. The concept illustration of the robot below was showcased as part of OFFSET's third field experiment. Associate professor Kiju Lee also announced that she was awarded a new DARPA contract for the Offset Sprint-5 effort focusing on enhancements to the physical robot testbed.
That program is focused on uncrewed ground vehicles with agile and versatile locomotive capabilities for urban military operations. Lee and her team are developing an adaptable Wheel-and-Leg Transformable Robot known as a-WaLTR able to transverse varying services, including staircases, more efficiently. The robot moves with wheels or legs depending on need and can decide on its own which to use.
The team is currently developing prototypes to showcase the hardware platform at OFFSET FX5, tentatively scheduled for February 2021. The team also notes that while the technology was created for military applications, it hopes there will be other applications for the technology in the future. Lee said that this adaptable robot could be applied to areas like space, domestic service, surveillance, and agriculture.
There is no indication at this time that functional prototypes of the robot have been constructed. It's unclear how much the contract to build the robot granted by DARPA is worth.