MIT's Autonomous Roboat Fleet Gets Larger And Learns New Ways To Communicate
MIT has been working on small autonomous boats for the last five years and has recently made some significant changes. The autonomous boats, called Roboat, are now two meters long and are capable of carrying passengers. The latest version is called Roboat II, and it also has a new algorithm called Simultaneous Localization and Mapping or SLAM.Other new features include a model-based optimal controller called a nonlinear model predictive controller and an optimization-based state estimator called moving horizon estimation. MIT professor Daniela Rus, senior author on the new paper about Roboat, says that Roboat II can navigate autonomously using algorithms similar to those used by self-driving cars. The algorithms were adapted for water, and MIT is developing fleets of the vessels able to deliver people and goods.
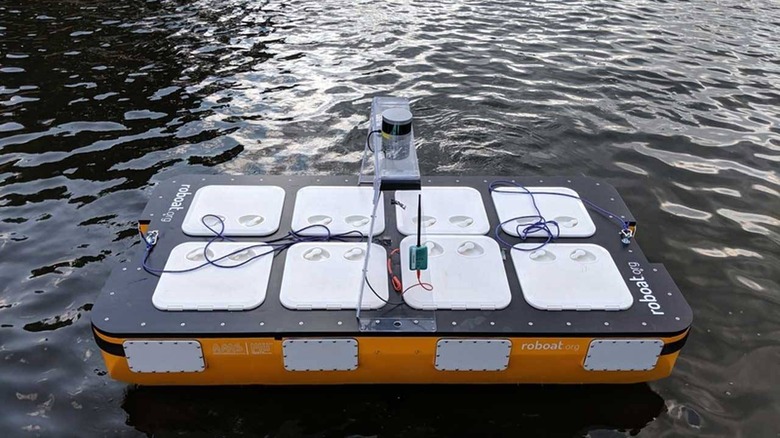
Like the original Roboat fleet, Roboat II can also connect with other Roboat II vessels to form a range of autonomous platforms to enable water activities. MIT says Roboat II is a "half-scale" boat joining the original Roboat, a quarter-scale vessel. In the future, the researchers intend to build a full-scale version that is four meters long and can carry 4 to 6 passengers.
Roboat II leveraged its algorithms to navigate the canals of Amsterdam autonomously for three hours while collecting data. When its mission was complete, the vessel returned to its starting location with an error margin of 0.17 meters, which is less than seven inches.
Roboat II is intended to self-assemble into a connected, multi-unit train using a distributed controller made up of a distributed collection of sensors, controllers, and associated computers throughout the system. The team was inspired by how a colony of ants transports food without communication. There is no direct communication among connected robots, with only the lead robot knowing the destination. The lead initiates movement to the destination, and other robots estimate the leader's intention and align movements accordingly.