Minimally Articulated Robot Can Climb Its Own Track
Researcher David Zarrouk from Ben Gurion University in Israel is known for developing robots that have a minimum number of actuators inside. The latest of his highly mobile robots with minimal actuators is the RCTR or Reconfigurable Continuous Track Robot. The bot manages to change its entire shape on a link-by-link basis using one extra actuator.
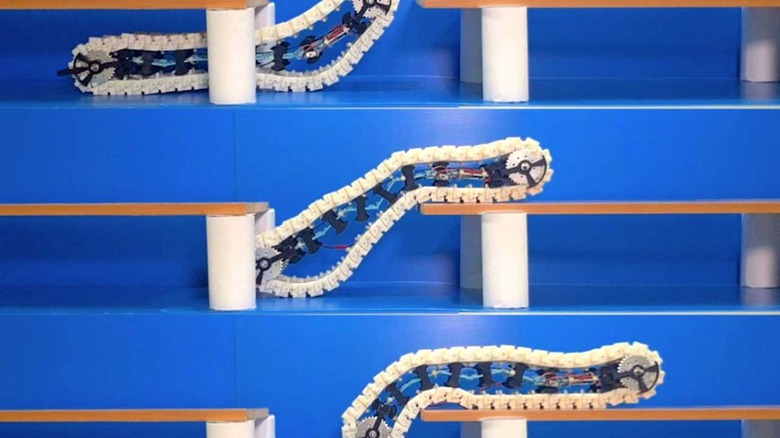
That single additional actuator can build the robot's track in the air as it moves forward. RCTR uses a bunch of flexible links that move across an actuator. Each of the links has a locking pin and depending on who the actuator is set when the link of the track moves across it, the pin can be engaged to get the link angle at zero degrees or 20 degrees.
The locking of the links turns the robot from flexible to stiff and allows RCTR to rear up and pass over an obstacle. The rear of the bot has a passive system that disengages the locking pins on every link to reset the flexibility of the track as it passes over the top of the rear section of the robot.
One downside to the current design of the robot is that is unable to steer. That could be remedied in several ways, including using skid steering like tracked vehicles with a pair of tracks. The team is working on a locomotion planning algorithm for handling a variety of terrain.
The team needs to figure out how to get the best combination of rigid and flexible links to overcome obstacles. It also needs to sort out how to make the bot steerable while maintaining its simplicity.