Your Daily Dose Of LEGO
Is LEGO better than coffee for getting through your day? I wouldn't skip the caffeine, but you can definitely check these out. We have here two separate LEGO projects, both impressive in their own right, for distinctly different reasons. They're both built with the Technic line. The first is an adjustable stand so that bad pixel over at instructables could play Game Boy on his Nexus One using a Wiimote. The second is a robotic factory line with four fully articulated picker arms, or as Chris Shepherd aka LegoShep aka TheOnlyShep calls it, the Lego Quad Delta Robot System.
Both of these projects have videos demonstrating their articulated operation. We'll start by looking at a short clip demoing bad pixel's smartphone stand.
You see, it's a relatively simple project. The levers and gears come together to make something workable so bad pixel could get his Wiimote-driven GameBoy emulation on in peace. It's a decent solution to a specific problem using stuff he already had laying around. But here, check this out. He used this really awesome piece of software to design the whole thing. It's called SR 3D Builder. Here's a quick screenshot.
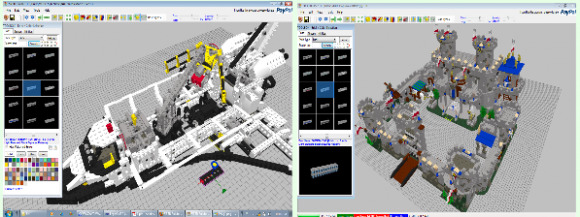
This piece of software lets you design LEGO projects in a slick little 3D interface. SR 3D Builder was designed by Sergio Reano out of Italy, and you can pick it up here. It's free. Knock yourself out. It's still under active development. Sergio released version 0.5.6.9 on the 8th of April. Oh yeah, bad pixel's instructable.
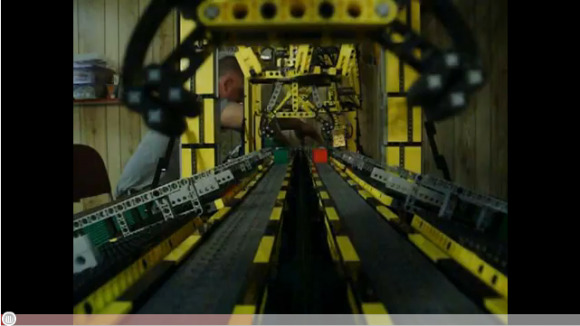
Next, we have this bad boy. Watch this video of Shepherd's Lego NXT robotic factory demonstration.
Shepherd here created this project because he has been fascinated with this style of Delta Robot for quite some time.
They are known for moving small objects very quickly, usually at two hundred or more moves per minute. Parallel robots (another name for Delta Robots) are often used in many industries such as the food industry where the payload is small and light and the production rates are very high. Many times a series of parallel robots are used to do things like assemble cookies, package small items, stack pancakes and much, much more.
The positions of the robotic arms are controlled by independent servo motors and the actuation of the gripping hands are controlled by a pneumatic system. There isn't really much I can say about this with any air of authority. He explains the whole process on his blog, Tinkernology. He goes into significant detail on the design aspects of each aspect of this robotic system. It's a good read.
[via Singularity Hub]
[via xda-developers]