1,024 robot flash-mob is cleverer when swarming
If you've ever wanted to see more than a thousand robots working together to create letters of the alphabet, Sesame Street style, today you're in luck. A robot swarm – the Harvard University team responsible also refers to it as a flash mob, which perhaps sounds a little less ominous – has been created to show how individually dumb 'bots can work intelligently when given the right tools, borrowing methods from biological systems like cells or even termites.
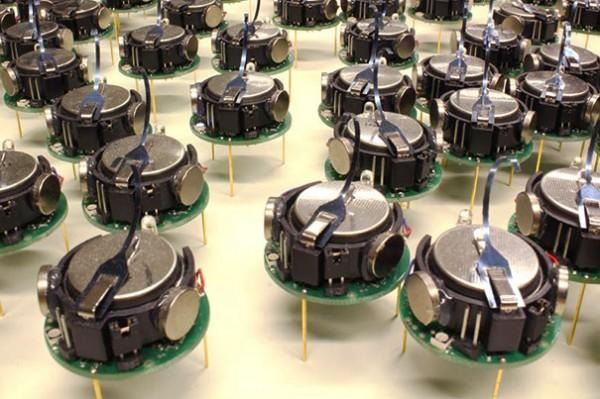
The swarm consists of 1,024 small Kilobots, each one a couple of centimeters in diameter, and standing on tripod legs. Those legs are vibrated by a pair of motors to shimmy the robot across whatever surface it's standing on; there's also basic wireless communication via an IR emitter and receiver that allows it to talk only with the nearest Kilobots around itself.
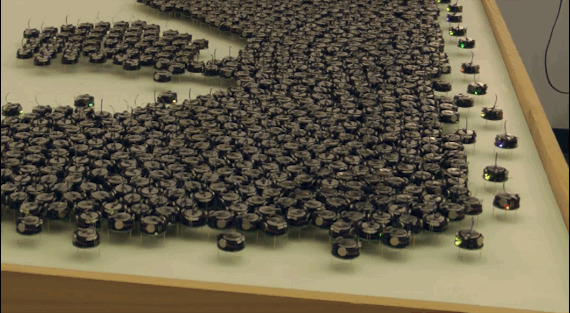
That's still enough to do some impressive organization, however. The Harvard team has developed smart software which, once the robots have been shown a 2D image to replicate, makes the overall swarm clever enough to replicate it.

First, four robots create a basic coordinate system, and then the remaining 1,020 shuffle into place accordingly, tracking things like where the edge of the swarm is, how far they are from the coordinate points, and how distant they are from each other.
Self-correcting systems can kick in if robots get off-track, or if bottlenecks form, with the swarm automatically reorganizing to accommodate the required movements. That's necessary, because of the relative paucity of the sensors and their individual accuracy.

It's not the first time we've seen robot swarms developed to improve overall effectiveness. Nano-quadcopters able to cluster together in different formations has been one mesmerizing example, and in fact back in 2011 the US Navy put out a call for pitches on collaborative robot designs.
Meanwhile, the TERMES project, revealed earlier this year, borrowed concepts from termites to make tiny robot builders that could independently construct structures by stacking bricks.
At the time, it was suggested that the technology could be used for robotic colonization in future space projects, with a swarm of TERMES 'bots sent ahead to distant planets like Mars to build habitats for the humans that would follow on later.
However, while the Kilobots may not be able to construct things, their advantage is in the size of the swarm potentially supported. Big collections of collaborating robots demand a strong algorithm, and so far few other approaches have managed that
The Harvard team has released the Kilobot's design and its software under an open-source license for further non-commercial research. Meanwhile, robotics manufacturer K-Team has licensed the design, and is selling the 'bot to schools and labs who want to experiment with swarming behaviors themselves.
SOURCE Harvard University
MORE K-Team